![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Hal the Calibration Bot |
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Hal, The Multi-Scale Calibration Robot. Once we were in production, it became very quickly apparent that we would need a robot capable of calibrating scales overnight. Thus was Hal born. He had a platen which would hold 20 scales, and in the process of calibrating them he got to place many weights in different positions on the pans of the scales. About 150 position/weight combinations. Hal was our main workhorse of calibration. As computers became more powerful over the 90's, he received brain upgrade after brain upgrade. Starting with a 16MHz processor and ending with 866 MHz. This photo was before the birth of his calibration competition Dave. Curiously, although both Hal and Dave were on the same ethernet network, and both had fine bidirectional visibility to everyone else on the network, they each refused to see the other. We never did solve this mystery! There are even some Quick-time movies of Hal, Lisa, Dave, and Pez on Lisa's page.

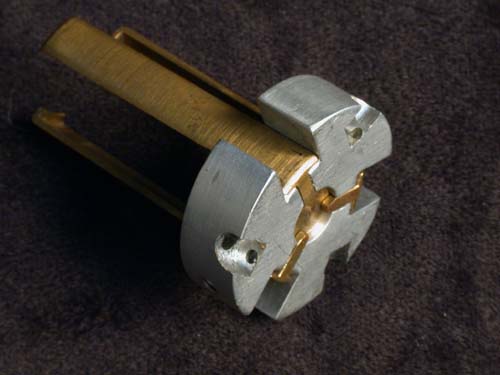
Gripper with which Hal picked and selected from up his weight stack
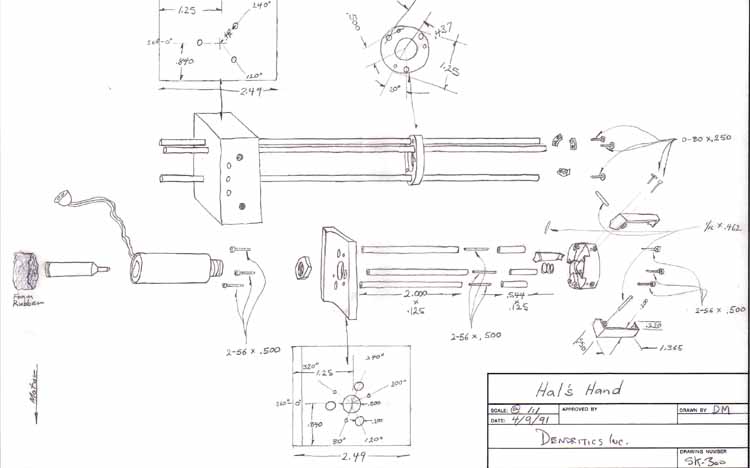
A plan Duncan drew up for Hal's hand. Note that the gripper above is on the right of the drawing.
![]()
Images and webpage designs © 2001-2024 your webmaster, jb and Dendritics Inc. [-]